【stm32】hal库学习笔记–定时器输出PWM波
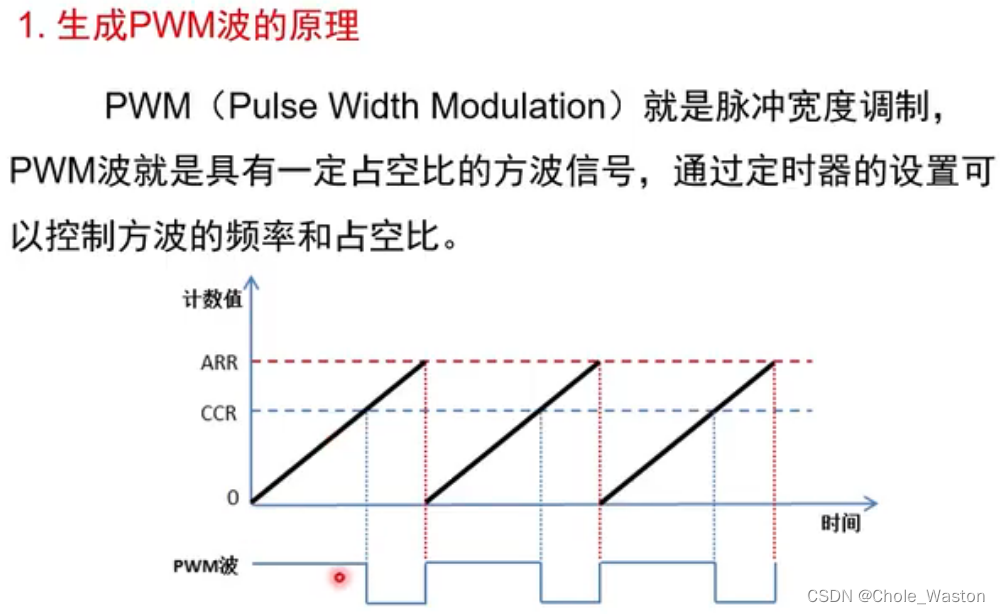
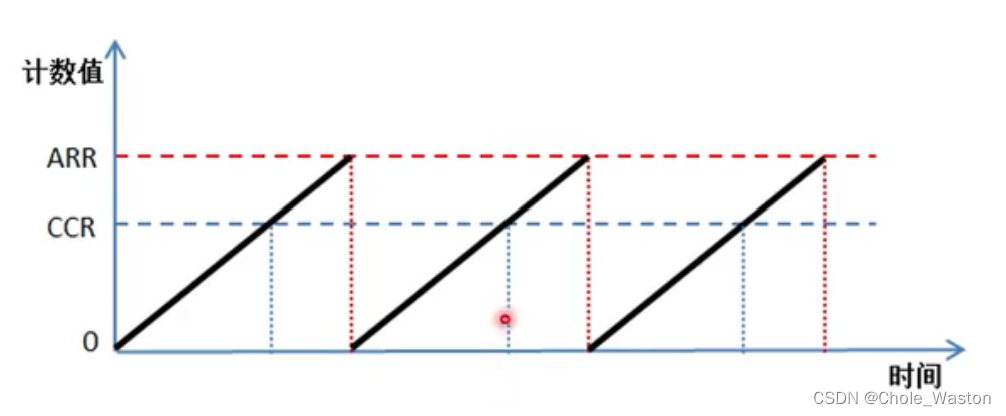
PWM波原理
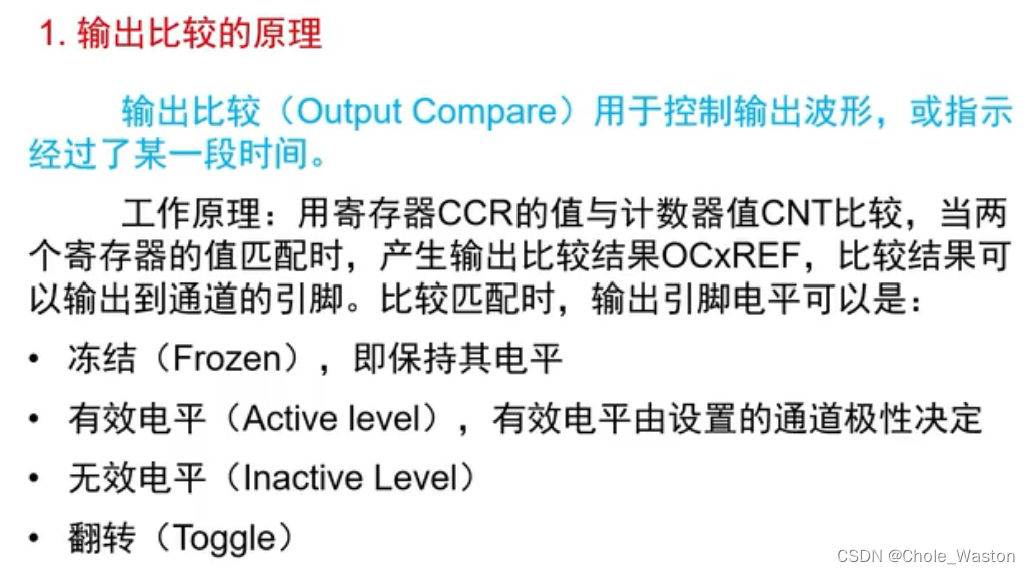
输出比较
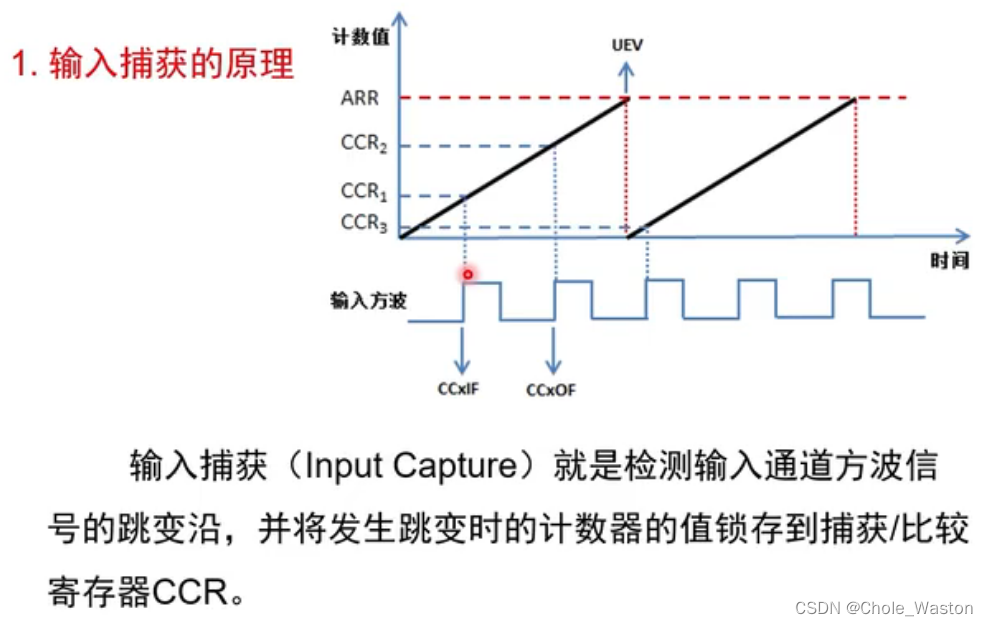
输入捕获
驱动函数
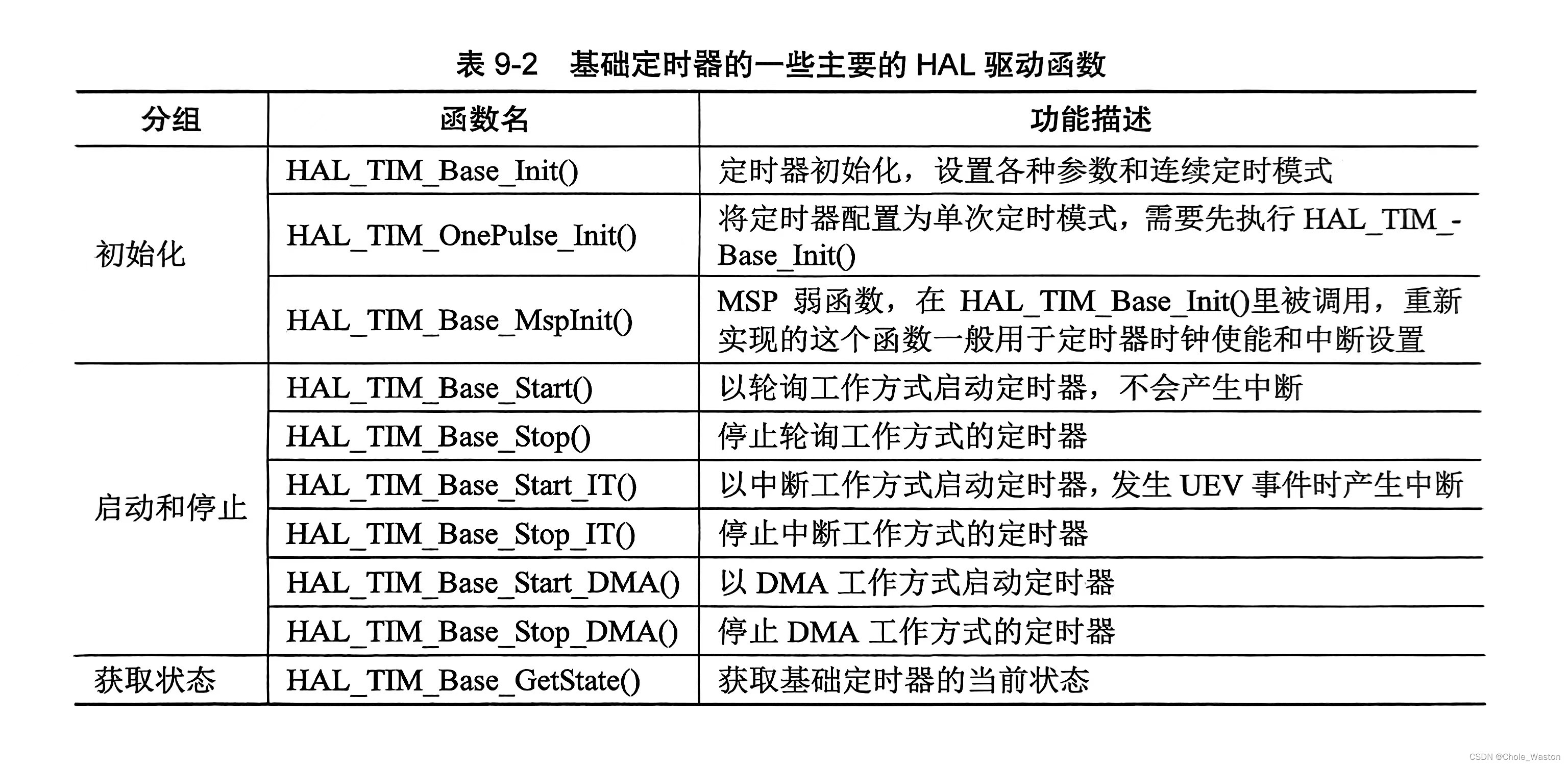
定时器驱动函数
PWM波驱动函数

定时器基本不使用DMA方式
定时器中断处理通用函数
HAL_TIM_IRQHandler
实验一:输出固定占空比PWM波
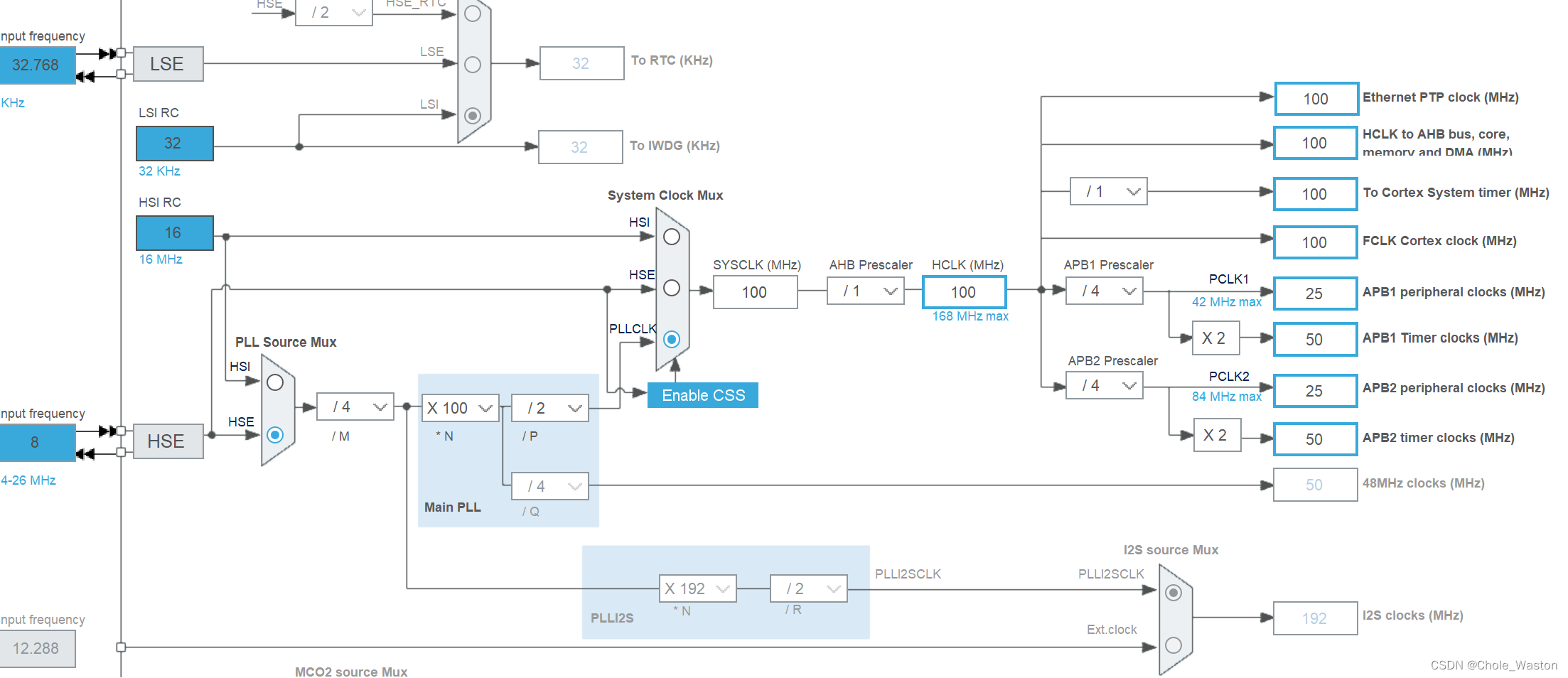
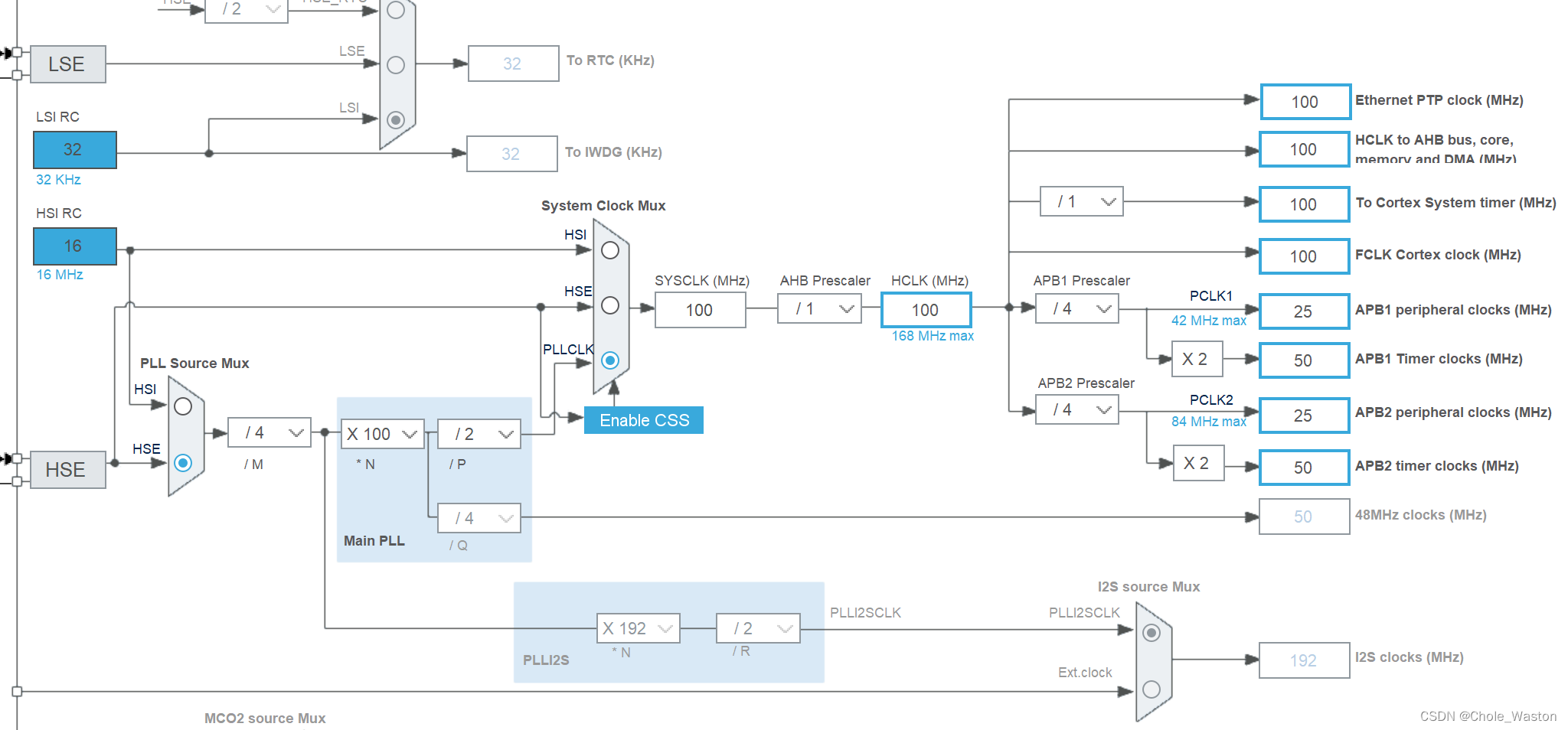
时钟树配置
PF9 改为tim14CH1
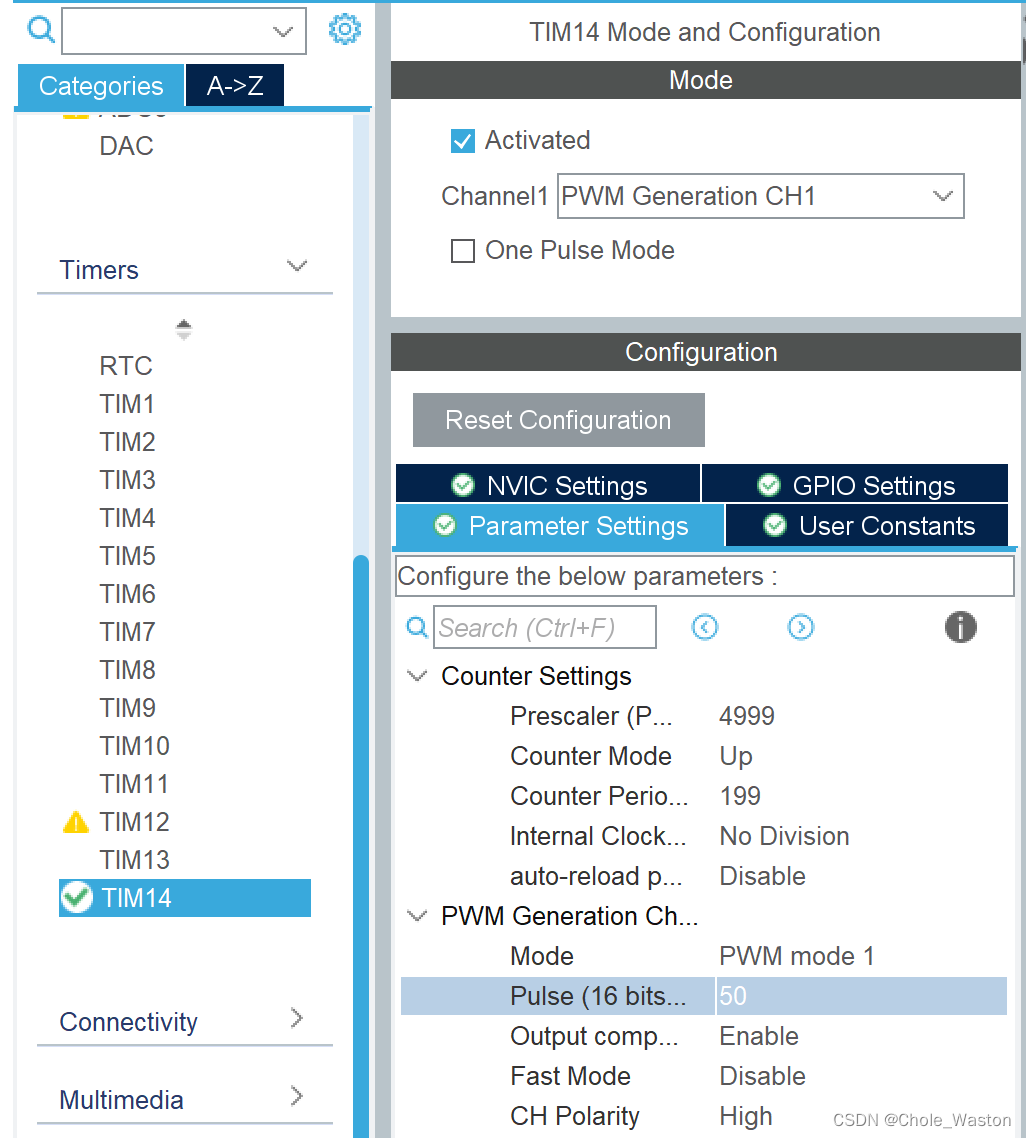
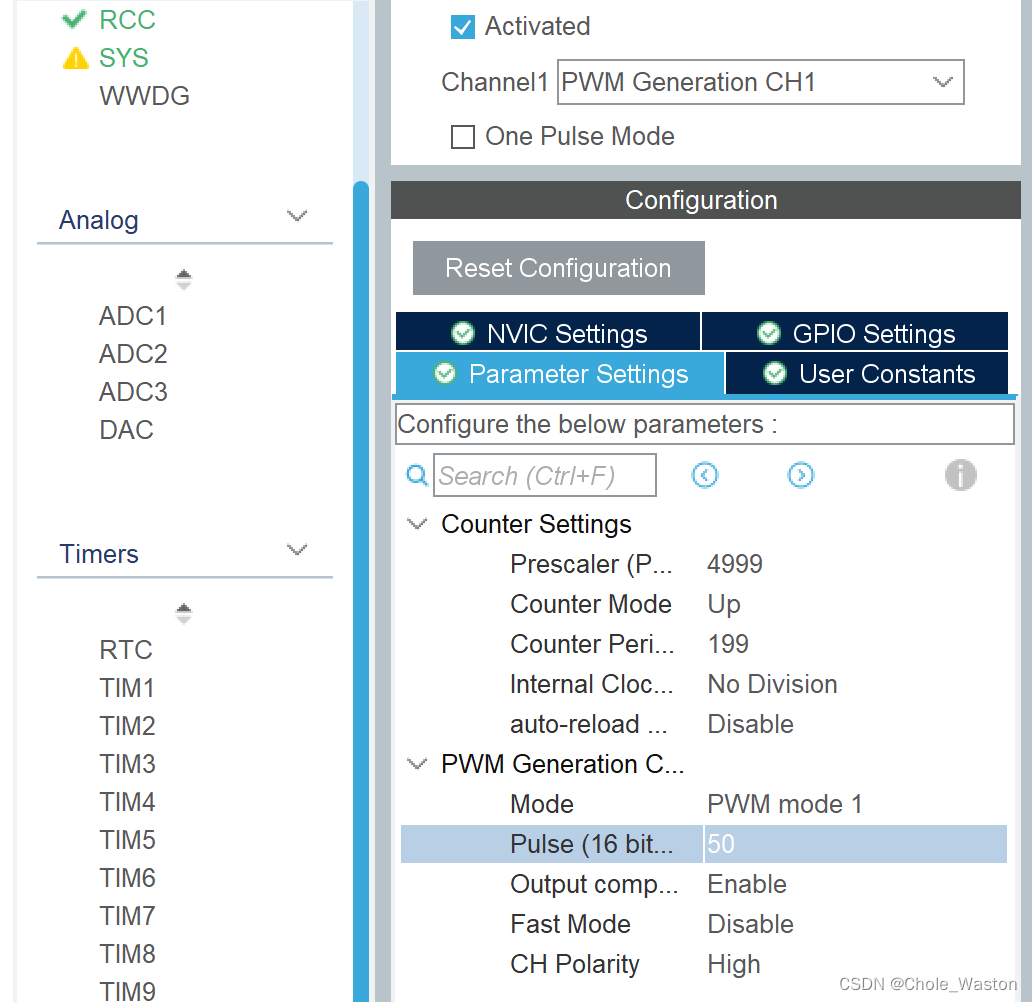
tim14配置
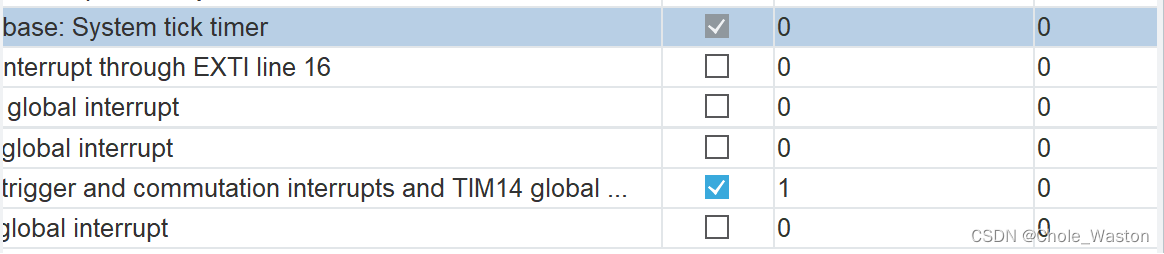
开启tim14全局中断 更改中断优先级
/* USER CODE BEGIN 2 */lcd_init();HAL_TIM_Base_Start_IT(&htim14);HAL_TIM_PWM_Start_IT(&htim14, TIM_CHANNEL_1);/* USER CODE END 2 */
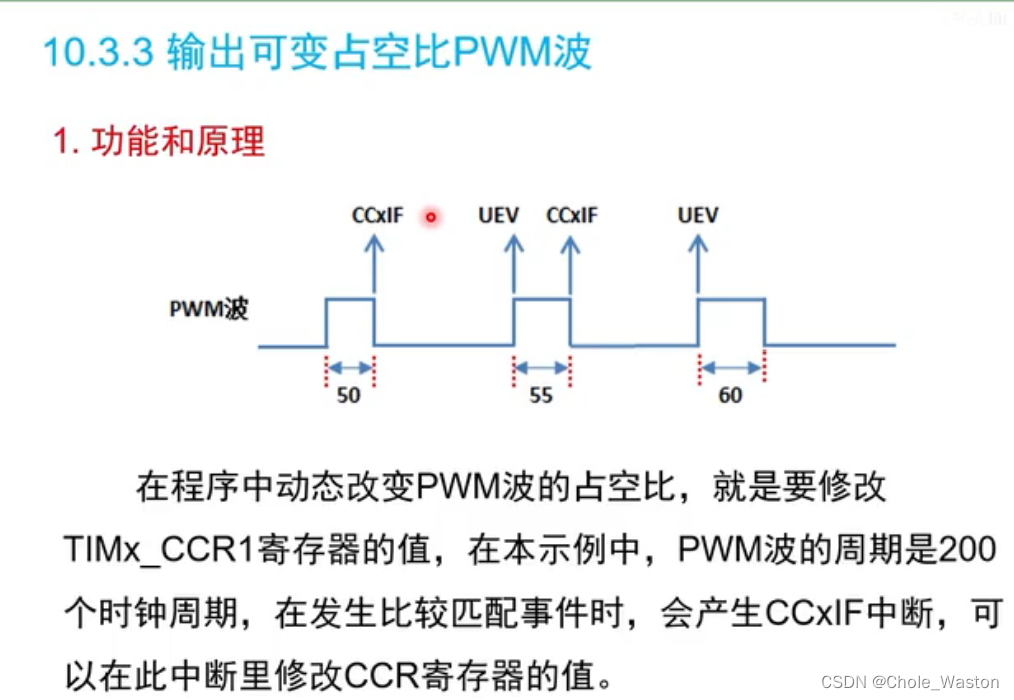
输出可变占空比PWM波
编写tim.c程序
/* USER CODE BEGIN 0 */
uint8_t pulseChangeDirection = 1;
uint16_t pulseWidth = 50;
/* USER CODE END 0 */
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim) {if (htim->Instance != TIM14) {return;}if (pulseChangeDirection) {pulseWidth++;if (pulseWidth >= 95) {pulseWidth = 95;pulseChangeDirection = 0;}} else {pulseWidth--;if (pulseWidth <= 5) {pulseWidth = 5;pulseChangeDirection = 1;}}__HAL_TIM_SET_COMPARE(&htim14, TIM_CHANNEL_1, pulseWidth);
}
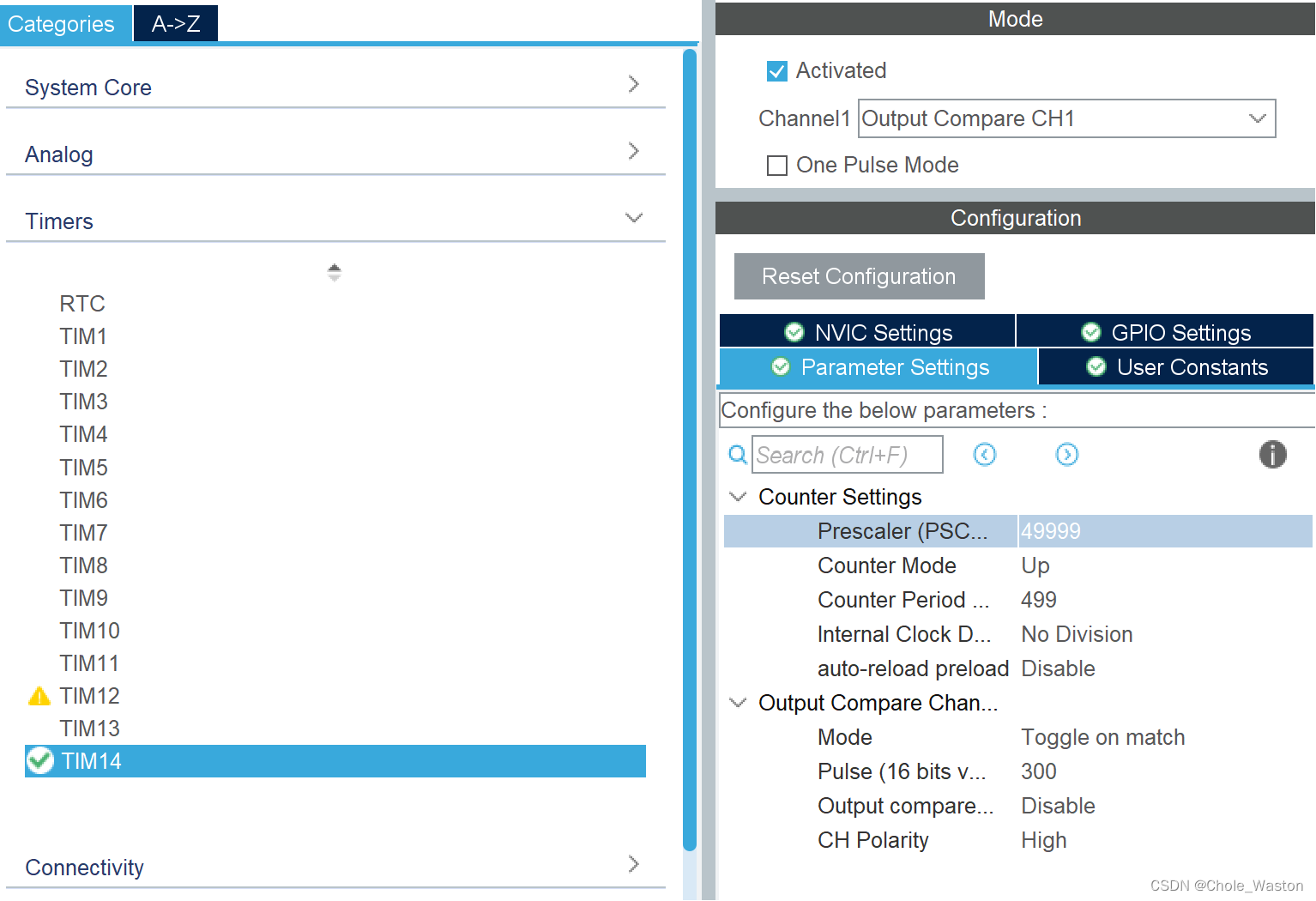
实验二:输出比较
定时器配置
测量PWM波的脉宽和周期
时钟树配置
 定时器tim14设置
定时器tim14设置
定时器tim9设置
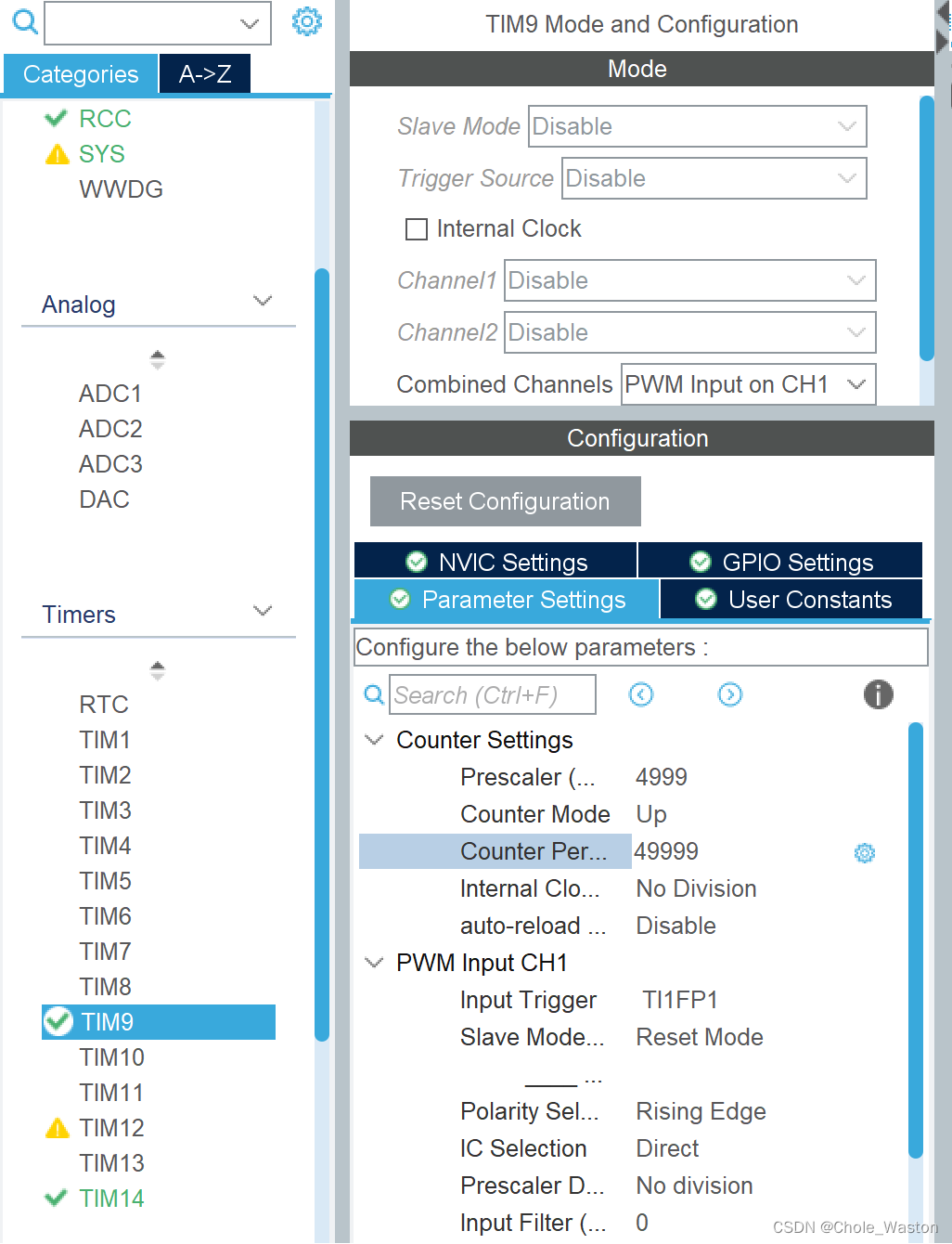
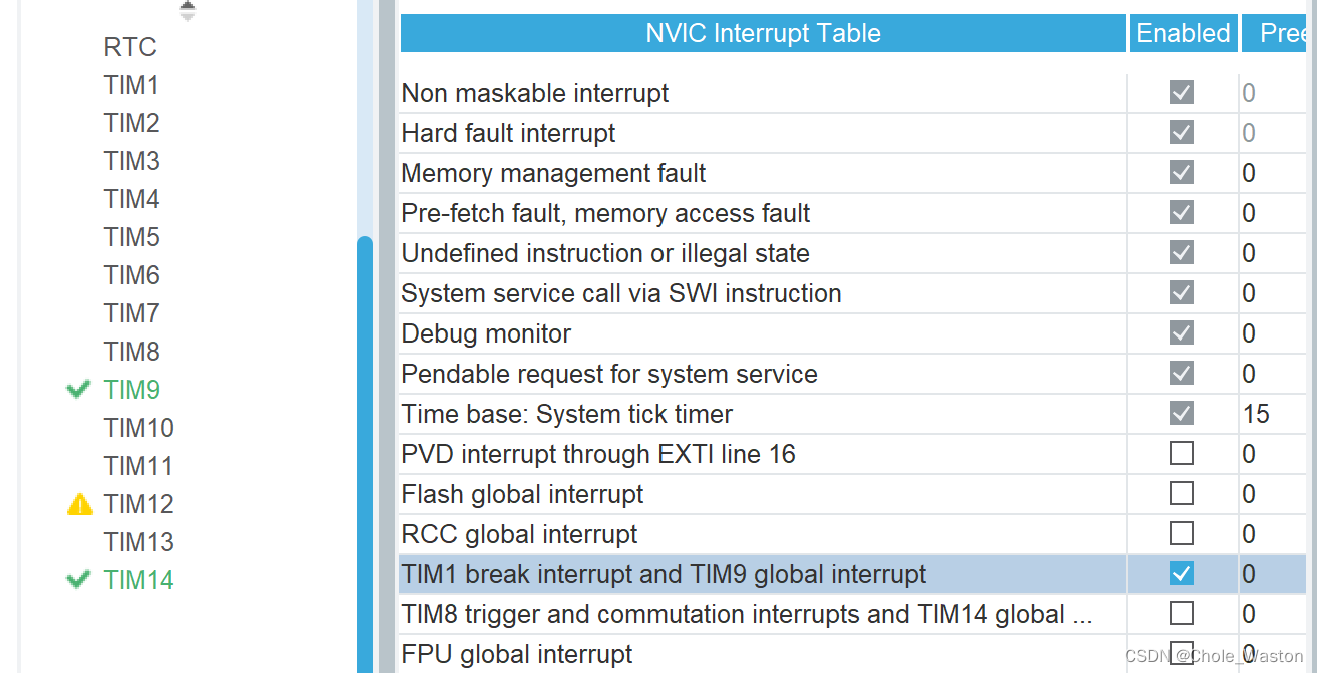
打开tim9中断
程序编写
/* USER CODE BEGIN Includes */
#include "lcd.h"
#include "keyled.h"
#include <stdio.h>
/* USER CODE END Includes */ /* USER CODE BEGIN 2 */lcd_init();lcd_show_str(0, 0, 16, "Demo10_3:PWM Input", RED);lcd_show_str(0, 20, 16, "TIM14 generate PWM on PF9(LED1)", RED);lcd_show_str(0, 40, 16, "TIM9 measure PWM on PE5", RED);lcd_show_str(0, 60, 16, "Please connect PE5 and PF9 by line", RED);lcd_show_str(0, 80, 16, "[1]KeyLeft to decrease pulse width", RED);lcd_show_str(0, 100, 16, "[2]KeyRight to increase pulse width", RED);HAL_TIM_Base_Start(&htim14);HAL_TIM_Base_Start(&htim9);HAL_TIM_IC_Start_IT(&htim9, TIM_CHANNEL_1);HAL_TIM_IC_Start_IT(&htim9, TIM_CHANNEL_2);HAL_TIMEx_PWMN_Start(&htim14, TIM_CHANNEL_1);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){KEYS curKey = ScanPressedKey(KEY_WAIT_ALWAYS);uint32_t CCR = __HAL_TIM_GET_COMPARE(&htim14, TIM_CHANNEL_1);if (curKey == KEY_LEFT) {__HAL_TIM_SET_COMPARE(&htim14, TIM_CHANNEL_1, CCR - 5);} else if (curKey == KEY_RIGHT) {__HAL_TIM_SET_COMPARE(&htim14, TIM_CHANNEL_1, CCR + 5);}HAL_Delay(300);/* USER CODE END WHILE */
/* USER CODE BEGIN 4 */
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) {uint16_t IC1_Width = __HAL_TIM_GET_COMPARE(&htim9, TIM_CHANNEL_1);uint16_t IC2_Pulse = __HAL_TIM_GET_COMPARE(&htim9, TIM_CHANNEL_2);if ((IC1_Width == 0) || (IC2_Pulse == 0)) {return;}char str[40];sprintf(str, "PWM width = %d", IC1_Width);lcd_show_str(0, 120, 16, str, RED);sprintf(str, "Pulse width = %d", IC2_Pulse);lcd_show_str(0, 140, 16, str, RED);}
/* USER CODE END 4 */